
![[variant_title] - Smart Electronics New for Arduino Diy Smart Car Robot Reflective Photoelectric 3pin IR Infrared Obstacle Avoidance Sensor Module](http://smartdevice.pk/cdn/shop/products/HTB1rLdVUr2pK1RjSZFsq6yNlXXaS_{width}x.jpg?v=1569828032)
![[variant_title] - Smart Electronics New for Arduino Diy Smart Car Robot Reflective Photoelectric 3pin IR Infrared Obstacle Avoidance Sensor Module](http://smartdevice.pk/cdn/shop/products/HTB1V3N8UAvoK1RjSZFwq6AiCFXaj_{width}x.jpg?v=1569828032)


![[variant_title] - Smart Electronics New for Arduino Diy Smart Car Robot Reflective Photoelectric 3pin IR Infrared Obstacle Avoidance Sensor Module](http://smartdevice.pk/cdn/shop/products/HTB1rLdVUr2pK1RjSZFsq6yNlXXaS_1024x1024.jpg?v=1569828032)
![[variant_title] - Smart Electronics New for Arduino Diy Smart Car Robot Reflective Photoelectric 3pin IR Infrared Obstacle Avoidance Sensor Module](http://smartdevice.pk/cdn/shop/products/HTB1V3N8UAvoK1RjSZFwq6AiCFXaj_1024x1024.jpg?v=1569828032)
Smart Electronics New for Arduino Diy Smart Car Robot Reflective Photoelectric 3pin IR Infrared Obstacle Avoidance Sensor Module
QUESTIONS & ANSWERS
Have a Question?
Be the first to ask a question about this.
Share this Product
Product parameters:
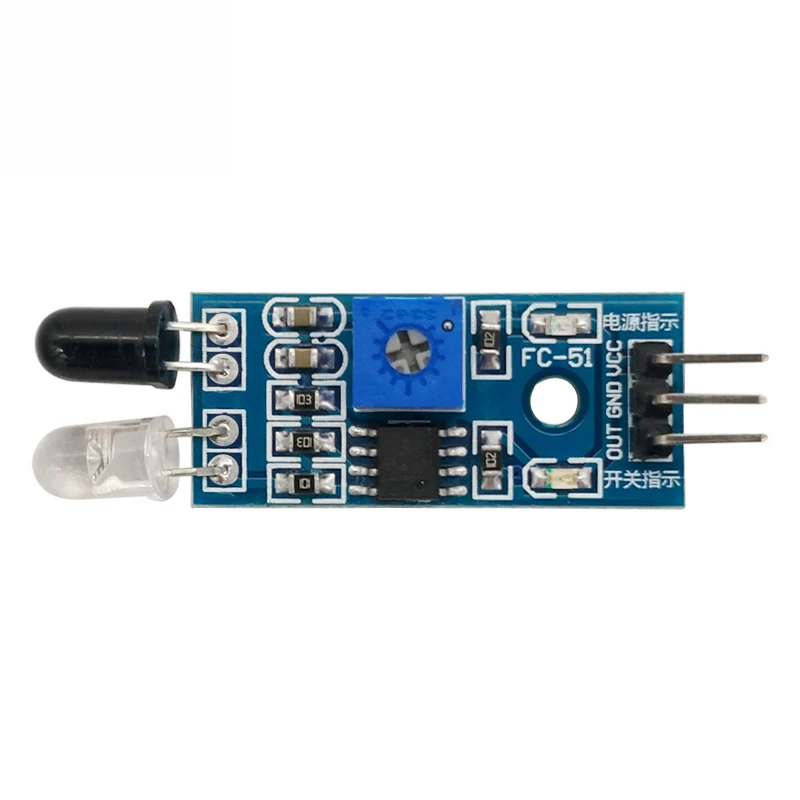
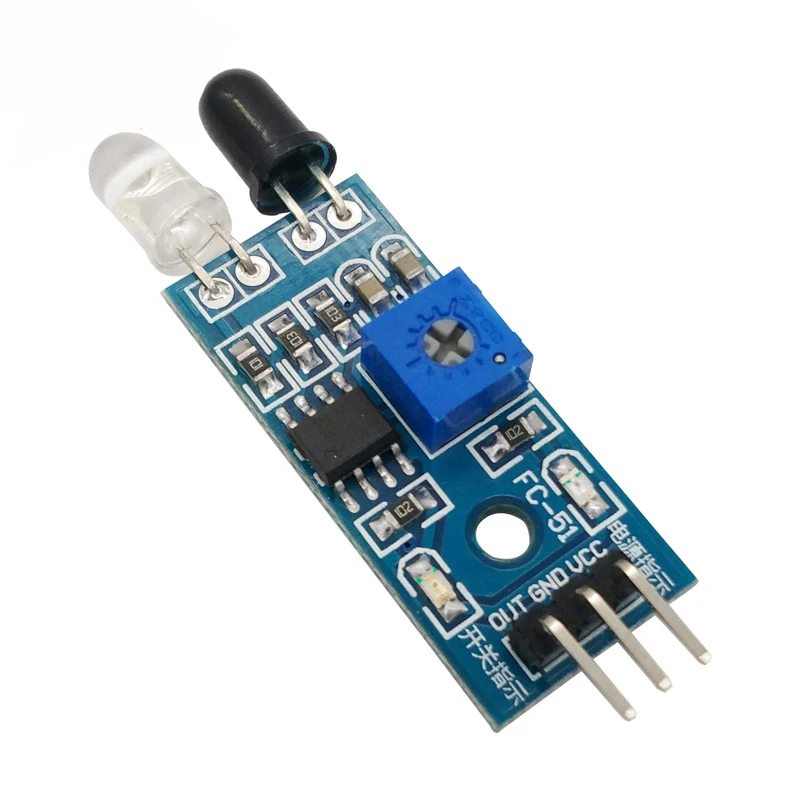
Product name: infrared obstacle avoidance module (from 2 to 30 cm adjustable)
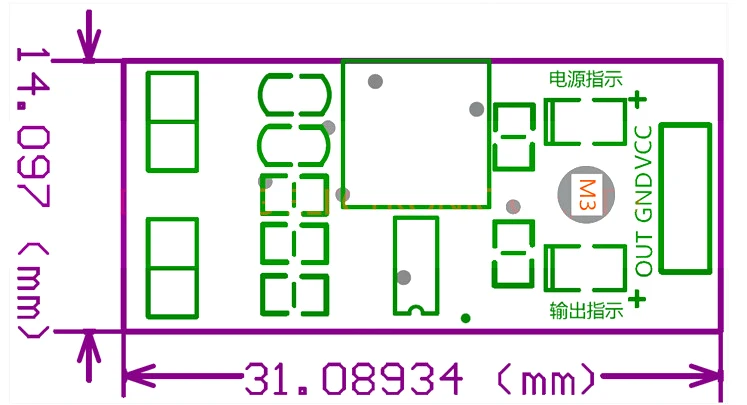
Product size: 45.50 mm X45.50 mm X8.50 mm (length x width x height)
Yan color: blue product weight: 3.42 g (including packaging)
Package is installed, a single module electrostatic bag packing materials: FR4 + electronic components
Product description:
The sensor module light is adaptable to the environment, it has a pair of infrared transmitting and receiving tube, tube infrared emitting a certain frequency, when detecting direction meet with obstacles (reflecting surface), reflected infrared receiving tube, after the comparator circuit processing, green indicator will light up, at the same time signal output interface and output digital signal (a low level 0V) signal, can be adjusted through the potentiometer knob detection distance, effective distance range 2 ~ 30 cm, the working voltage of 3.3 V to 5 V.The detection range of the sensor can through the potentiometer to adjust and have small interference, easy to assemble, easy to use, etc, can be widely used in robot obstacle avoidance, obstacle avoidance car, line count and black and white line tracking and so on many occasions.
Product performance:
1.. when signal module without obstacles ahead, the OUT port (5V) output level continuously.
When the module detects obstacles ahead signal, circuit board on the green light is lit, the OUT port at the same time
Continuous output low level (0 v) signal, the detection module from 2-30 cm, 35 ° Angle detection, detection
Distance can be adjusted through the potentiometer, clockwise adjust potentiometer, detection distance increases;Counter-clockwise tuning Potentiometer, reduce the detection distance.
2. Active infrared reflection detecting sensor, therefore the reflectivity and shape of the target is the key of the detection range.
One black minimum detection range, white biggest;Small area of the object distance, large distance.
3. The sensor module output port OUT can be directly connected to the microcontroller IO port, can also direct drive
a 5V relay,Connection mode: the VCC - VCC;GND - GND The OUT - IO
4, the comparator USES the LM393, work stability.
5, can use 3.3 V to 5 V dc power to power supply module.When power on, the red power indicator Lights up
Source code:
Int Led = 13; // define the LED interface Int buttonpin = 3; // Define the obstacle avoidance sensor interface Int val; // Define the numeric variable val Void setup () { PinMode (Led, OUTPUT); // define the LED as the output interface PinMode (buttonpin, INPUT); // Define the obstacle avoidance sensor as the input interface } Void loop () { Val = digitalRead (buttonpin); // Write the value of the numeric interface 3 to val If (val == LOW) // When the obstacle avoidance sensor detects a signal, the LED is on { DigitalWrite (Led, HIGH); } Else { DigitalWrite (Led, LOW); } }
Directions for use
1. VCC external 3.3V to 5V voltage (which can be directly connected to 5V microcontroller or 3.3 V microcontroller)
2. The GND external GND
3. The OUT small plate digital output interface (0 and 1)
Package Included:
1pcs X 3PIN IR Infrared Obstacle Avoidance Sensor Module






![[variant_title] - (1piece/lot) PMI8952 000 PM8937 0VV PM8941 0VV PM8952 001 PMI8937 PM8953 PM8940 PMI8994 002 PM8953 PMI8940](http://smartdevice.pk/cdn/shop/products/HTB1ob66ncj_B1NjSZFHq6yDWpXa6_{width}x.jpg?v=1569821702)
![[variant_title] - (1piece/lot) PMI8952 000 PM8937 0VV PM8941 0VV PM8952 001 PMI8937 PM8953 PM8940 PMI8994 002 PM8953 PMI8940](http://smartdevice.pk/cdn/shop/products/HTB1ob66ncj_B1NjSZFHq6yDWpXa6_large.jpg?v=1569821702)